前言
首先,网络流不是一个算法,而是一个整合包(玩MC玩的),说白了就是网络流是多个算法的统称:
- 最大流
- EK
- Dinic
- 最小割
- 费用流
- …
而且,有些不常用的,可能就不会提,粘个OI Wiki的链接就不详细写了。
接下来就按照这个目录挨个讲一下每个算法。
最大流
如果有哪里没有说清楚,可以看这里,里面还有我没有说到的最大流类型。
看到最大流这个名字很多人都很陌生,这里就先从定义说起。
定义
还是拆词法,“网络流”就可以大致理解为“网络”上的“流”,接下来就挨个说一下这两个的定义。
网络
先说网络的定义。(当然不是Internet)
我们在理解的时候可以认为是管道,但实际上它是一张特殊的有向图。
建设管道的必然知道,管道内流过的水,准确来说是单位时间内流过的水,必然是有上限限制的,否则管道就炸了。
这里也一样,对于每条边 $x \to y$,都有一个函数 $c(x,y)$ 表示这条边的限制,又称容量。
如果在图上没有这条边,则统一规定 $c(x,y)=0$。
最后,还是跟最短路一样,它有一个起点和一个终点,又称源点 $S$ 和汇点 $T$($S \not= T$)。
流函数
再说流函数。
流函数就是说,在真实操作中,一个单位时间内一条边 $x \to y$ 流过的水量 $f(x,y)$。
这里默认保证每个单位时间内都得流过这么多。
其实很好理解。
流函数性质
顺便说一下流函数要满足的性质。
首先,源点可以无限输出水,汇点可以无限输入水。
接下来就是一堆性质:
- 对于每个 $x,y$,显然 $f(x,y) \leq c(x,y)$(容量限制)。
- 对于每个 $x,y$,$f(x,y)=-f(y,x)$(斜对称)。
- 对于每个 $x$,满足不是源点也不是汇点,$\sum\limits_{u \to x} f(u,x)=\sum\limits_{x \to v} f(x,v)$(流量守恒)。
这里说一下最后一点性质。
首先,$u \to x$ 即代表对于每个 $u$ 满足 $u$ 到 $x$ 有边,$x \to v$ 同理。
其次,这个翻译过来就是说,对于不是源点不是汇点的任何点,它们都不会凭空产生水,也不会让水凭空消失。
而源点和汇点呢?源点就没有入,凭空产生水;汇点就没有出,让水凭空消失。
容易理解
流量
说到流,那必定要提流量。(当然不是你们家的网络流量)
其实流量就是上面说的“流过的水量”,说白了就是 $f(x,y)$。
这里说一下一个细节,$f$ 是流函数,$f(x,y)$ 是该边的流量。
同时,还有一个反面定义,就是 $c(x,y)-f(x,y)$ 为该边的剩余容量。
(注意上面两个加粗题的表达)
但这只是一条边的流量,如果扩展到一张图,根据流量守恒,直接看源点输出了多少水,就是整张图的流量。
也即汇点输入的水量。
最大流
最后再说最大流的定义。
这里说一下,最大流其实是一个函数,就是流函数。
而与它仅差一个字的最大流量,才是一个数值,即最大流对应方案的流量。
(不过似乎没有很多人会在乎这两个定义的差别,底下的所谓“求最大流”的算法,应该是“求最大流量”)
说完这个后,顾名思义就能猜到定义了。
就是合法的流函数有很多,使得整张图的流量最大的流函数,就是最大流。
EK(Edmonds Karp)
说完定义,接下来就从最基础的EK算法说起。
这个算法复杂度很高(至少相对Dinic而言),但它确实是所有网络流算法的基础。
因为Dinic就是从EK上优化的,最小割、费用流都是以Dinic为基础的。
接下来先讲实现,再讲原理。
不过一般没人写EK。
实现
而且,其实EK和二分图(匈牙利算法)很像,都是求增广路。
说白了,就是当前解不优,找一个更优的。
其本质就是反悔贪心。
而此处的增广其实是这么实现的:
- 先建图,带权,同时建一个反向的、边权为 $0$ 的边。
- 即对于原图中的一条边 $(u \to v, w)$,建两条边:
- $(u \to v,w)$
- $(v \to u,0)$
- 注意一下,不要对这里的反向边有“种族歧视”,就把反向边当做是普通的边,人人平等(
- 即对于原图中的一条边 $(u \to v, w)$,建两条边:
- 然后,不断做这件事:
- 从源点开始BFS,中途记录一下当前所有经过的边的边权最小值。
- 如果BFS到了汇点,答案加上最小值 $val$。
- 同时对于每条经过的边:
- 让这条边的边权减去 $val$。
- 让它反向边边权加上 $val$。
- 直到从源点开始,无论如何都得经过一条边权为 $0$ 的边才能到汇点为止。
- 因为如果经过一条边权为 $0$ 的边,此时就不用往下搜了。
- 最后,直接输出答案,即所有最小值之和即可。
接下来说原理。
原理
首先,说一下加反向边的大致意思。
其实就是说,你在反向边上流过 $v$ 的水,就相当于让这条边少流 $v$ 的水。
其次,说一下BFS这部分的原理。
还是举具体的例子。
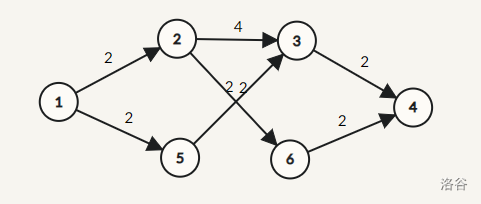
在这张图里,我们模拟一下,首先一定找的是 $1 \to 2 \to 3 \to 4$ 这条路径。
随后把反向边更新。
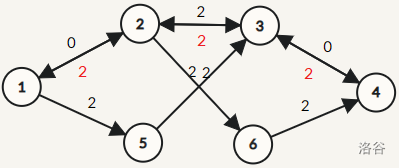
(注:在边上面,黑色的是原本边的边权;在边下面,红色的是反向边的边权)
接下来增广的是 $1 \to 5 \to 3 \to 2 \to 6 \to 4$ 这条路径。
此时已经无法继续增广。
所以最终答案为 $2+2=4$。
而怎么理解呢?其实只是这个返回的机制很独特而已。
我先BFS到 $1 \to 5 \to 3$,然后把最开始的路径 $3 \to 4$ 部分拼走了。
此时最开始的路径中的 $1 \to 2$ 开始重新寻路,就把增广路径中的 $2 \to 6 \to 4$ 拼走了。
所以最后是两条路径:
- $1 \to 5 \to 3 \to 4$
- $1 \to 2 \to 6 \to 4$
答案为 $4$。
复杂度
$O(nm^2)$
其中 $n$ 为点数,$m$ 为边数。
证明之后补
Dinic
接下来就是重头戏了,就是Dinic算法。
这个算法相比而言,复杂度就小了很多。
并且,在求二分图最大匹配方面,比匈牙利算法跑得更快。
这次跟上面反过来,先说原理再说实现。
原理
首先,我们考虑一下EK算法为何复杂度如此之大。
其实就是因为,它每次都得进行BFS,每次都从源点开始搜到汇点。
但做了这么多功,不还是只能搜一条增广路吗。
这就导致花的时间很多,但得到的收益很少。
所以我们就对症下药。
也就是我们可以一次搜多条最短路。
不过准确来说,我们是不一定每次都从源点开始,就像遍历一棵树一样,每次都从当前点开始搜。
这样的话复杂度就能剩很多。
实现
原理很好解释清楚,但实现其实细节很多。
这会虽然也用BFS,但实际上上面已经透露了,Dinic的核心在于DFS,所以BFS只求最短路。
具体来说,我们是这样实现的:
- 只要图还连通,就从源点开始做一遍BFS,求出现在源点到每个点 $i$ 的距离 $dis_i$。
- 此时就不断做DFS,并进行增广,直到不能增广为止。
- 一次DFS的返回值是多次增广的结果之和。
- 将答案加上返回值。
- 此时就不断做DFS,并进行增广,直到不能增广为止。
说一下,连通的意思是存在一条路径从源点到汇点且不经过边权为 $0$ 的边;同理,边权为 $0$ 的边是不可经过的。
接下来就是重头戏了,就是DFS的具体实现。
首先,上面EK算法里,由于用BFS实现,所以每次增广都是走的当前的最短路。
显然这也是最优的。
那在这里,我们也得保证一定要最短。
咋做呢?我们不是BFS出了距离 $dis_i$ 吗?我们干脆在DFS的时候只遍历最短路图即可。
即对于一个点 $x$,只遍历满足 $dis_{to}=dis_x+1$ 的出点 $to$。
还是跟之前差不多(至少有点雷同的思想),直接放实现:
- DFS传入两个参数,一个是当前点 $x$,一个是流到点 $x$ 的水量 $lim$。
- 遍历 $x$ 的每个满足条件的出点 $to$,设这条边的边权为 $len$。
- DFS下去,并且给出点 $to$ 以 $\min(lim,len)$ 的水。
- 遍历 $x$ 的每个满足条件的出点 $to$,设这条边的边权为 $len$。
【优化】如果说发现DFS的返回值(设为 $val$)为 $0$,则说明该子树无法增广,直接将该出点标记不可访问。 - 这一步有一个很好的实现方式,就是把 $dis_{to}$ 设为 $0$,此时一定不会被遍历到。
- 更新 $x \to to$ 及其反向边的边权。
- 由于 $val$ 的水已经从 $x$ 流出,所以 $lim$ 减去 $val$。
【优化】如果 $lim$ 为 $0$ 了,则水已经不可能再流出了,直接退出循环。 这里注意一个点,就是虽然给 $to$ 提供了 $\min(lim,len)$ 的水,但其实真正流出去的只有 $val$ 单位的水,所以所有更新都应该用 $val$,完全与 $\min(lim,len)$ 无关。
- 我们考虑一下,显然一个点可能被DFS多遍。
- 而每次我们都遍历一遍所有出点吗?显然不是。
- 那么我们每次就记录一下遍历到哪个出点了。
- 下次就直接从这个出点开始遍历。
- 此处就有两种实现方式了:
- 使用
vector建图,记录当前遍历到的下标。 - 使用链式前向星建图,不断更新表头。
- 使用
- 但要注意一下,第2种方法在更改表头之后,要记得还原回来,否则会出错。
复杂度
$O(n^2m)$
其中 $n$ 为点数,$m$ 为边数。
证明之后补
但这个只是上界,在一般的网络内,是往往达不到的。
比如说,在 $n \leq 10^4,m \leq 10^5$ 的题目内,用Dinic只跑了 $300~\text{ms}$。
二分图
参考:这里
这里顺便说一下如何用Dinic去求二分图最大匹配。
既然是图论算法,难点必然在于建图。
而这里怎么建呢?直接上结论:
- 从源点往每个二分图的左侧点连容量为 $1$ 的边。
- 从每个二分图的右侧点往汇点连容量为 $1$ 的边。
- 二分图的左右侧点之间仿照二分图连法连容量为 $1$ 的边。
然后跑最大流即可。
由于图的特殊性,此时复杂度最多为 $O(m\sqrt{n})$,与匈牙利算法的 $O(nm)$ 差了一个根号。
最小割
如果有哪里没有说清楚,可以看这里。
说完最大流,再说一个与它息息相关的最小割。
还是先从定义说起。
定义
对于一个网络(就是一张有向图)$G=(V,E)$ 来说,如果存在一个边集 $E’$ 满足 $E’ \subseteq E$。
且从 $G$ 中删去 $E’$ 的边后,该网络的源点和汇点不再连通。
那么 $E’$ 边集被称为割,其中的任意一条边满足 $e \in E’$ 都被称为割边。
而使得所有割边的容量之和最小的割,被称为是最小割。
求值
接下来说求值。
其实可以八个字搞定:
- 最小割等于最大流
理论上这个不严谨,我们把它严谨化一下:
- 对于任意一个网络,该网络的最大容量,等于该网络的最小割中所有割边的容量之和
所以其实直接求最大流即可。
证明
之后补
费用流
时隔多年,终于可以补一下费用流的坑了。
定义
首先我们需要先明白费用流是什么。
其实就是在网络流的流量限制之外,还多了一个每流过一单位的流量需要花费的代价。
一般分为两种:
- 最小费用最大流,就是说保证最大流的情况下把费用最小化。
- 最小费用流,就是不用保证最大流,把费用最小化即可。
实现
直接讲实现。
其实费用流的实现比最大流简单多了。
最小费用最大流
直接:
- 不断按单位代价作为边长跑SPFA。
- 只要SPFA还能走出来(不经过 $len=0$ 的边),就继续。
- 然后把SPFA最短路路径上所有边流过“边权的最小值”的流量。
- 更新答案。
所以最后的复杂度就是 $O($ 增广次数 $\times$ SPFA复杂度 $)$。
这个东西一看就很玄学,结果就是这样的。
增广次数可能会被卡到流量级别(特殊构造数据情况下),SPFA则是 $O(nm)$ 最多。
所以说一般费用流如果确定要用,且这样建图一定最优,必然是给放过的。
不过注意一下,有时候一点不同的建图方式就是大相径庭的运行效率。
最小费用流
稍微改一下。
既然我们需要通过不断SPFA来增广。
那么只要SPFA出来的最短路 $>0$,那么最后的费用一定不是最小了。
于是直接:
- 不断按单位代价作为边长跑SPFA。
- 只要SPFA还能走出来(不经过 $len=0$ 的边),就继续。
- 如果最短路 $>0$,退出循环。
- 把SPFA最短路路径上所有边流过“边权的最小值”的流量。
- 更新答案。
复杂度同上。